


Descrição
O RS10 LASER SLAM, integra um potente sistema RTK de última geração com a digitalização a laser. Graças ao receptor GNSS RTK integrado de última geração, à tecnologia de algoritmo SLAM e VISUAL SLAM, este dispositivo inovador e topo de gama no mercado dos slams, permite alcançar uma excelente precisão de mapeamento, baixo ruído aliado a uma rapidez e simplicidade no levantamento nos mais variados tipos de ambiente, o que é inatingível com sistemas equipamentos SLAM padrão que têm algoritmos mais simples e sensores mais rudimentares e cabeça não rotativa que é algo imprescindível em slams de médio e longo alcance.
Graças a esta combinação de tecnologias, o RS10 oferece precisão incomparável em medições geoespaciais, e mapeamento 3D, tanto em ambientes externos quanto internos, quanto em transição. O scanner SLAM RS10 CHCNAV é uma ferramenta confiável de mapeamento 3D para topógrafos, engenheiros civis, especialistas em BIM, bem como para medições agrícolas e florestais, inspecções de linhas de energia, cálculo de volumes, Mesh ou recolha de dados em espaços subterrâneos.

RS10 CHCNAV – fusão de tecnologias RTK e SLAM
A CHCNAV que tem uma delegação na Europa, é especializada no desenvolvimento de tecnologias GNSS, é actualmente uma das maiores empresas mundiais nesta área e que aposta fortemente em inovação e desenvolvimento, tendo já várias soluções não só para topografia tradicional, como batimetria, drones, Laser scanner, monitorização etc.
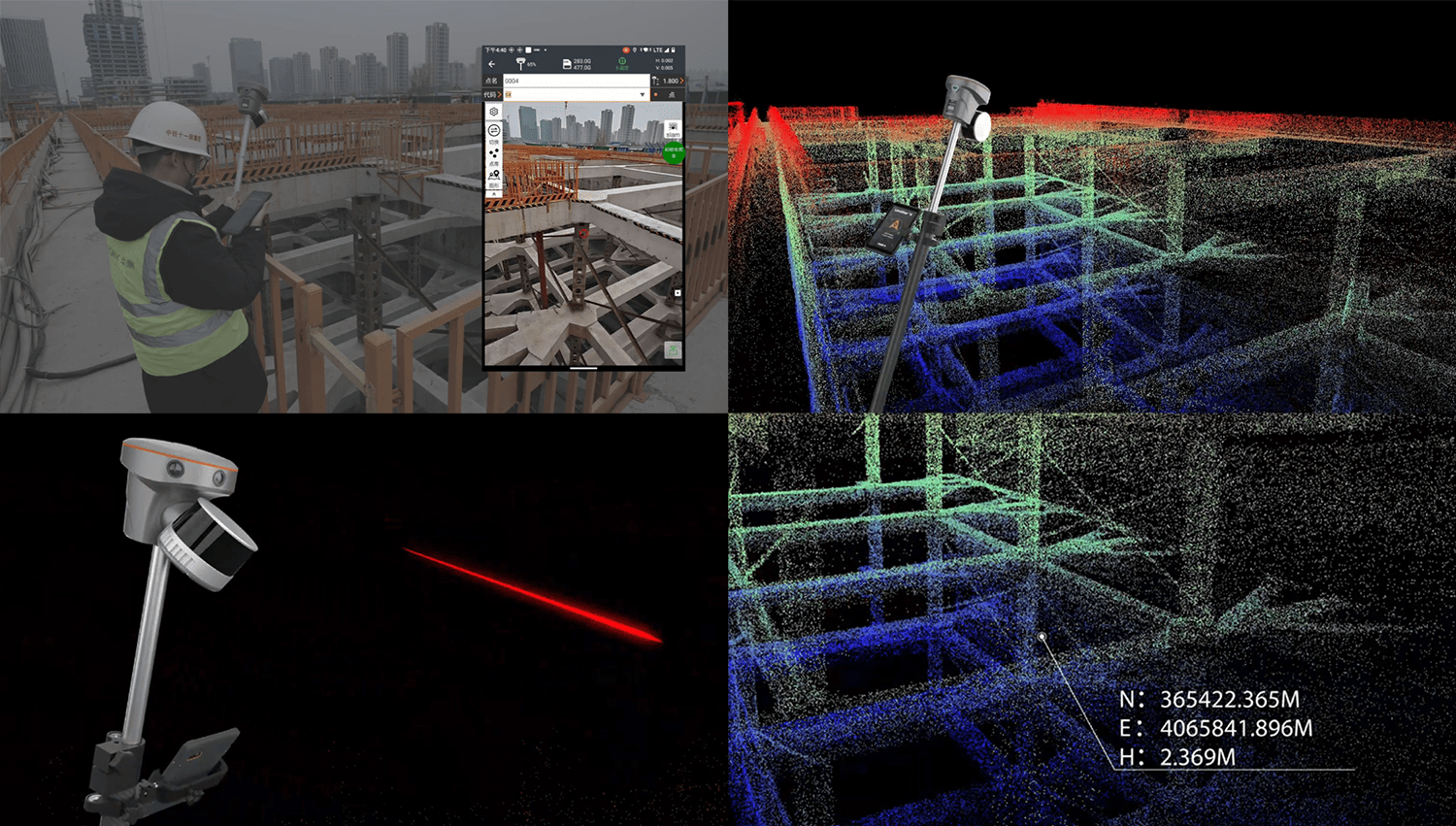
O SLAM RS10 integra componentes tecnologicamente muito avançados, uma antena RTK de quarta geração que permite operar com precisões centimétricas até em ambientes muito difíceis, um avançado scanner LiDAR e três câmaras HD, fundem o RTK com a tecnologia Slam e Visual Slam, garantindo que o R10 alcance uma precisão de medição absoluta de menos de 5 cm e relativa de 1cm, independentemente das condições de operação e elimina a necessidade do tradicional fechamento de loop (ver foto abaixo). Além disso, com o planeamento de rotas sem loops, o RS10 reduz o tempo e o esforço necessários para recolher dados de campo e concluir projectos . Com este Slam pode gerar directamente quer nuvens de pontos quer uma mesh.

Scanner móvel LiDAR 3D com tecnologia SFix para trabalho preciso sem acesso a satélites
Trabalhando em modo GNSS Rover, a tecnologia SFix utilizada no RS10 permite que as medições de pontos sejam realizadas em áreas sem acesso a sinais GNSS, onde as medições RTK tradicionais não seriam possíveis. O scanner RS10 portátil e móvel, permite determinar obter em tempo real as coordenadas exactas de um ponto com base no sensor LiDAR e nos algoritmos SLAM, como se de um tradicional GNSS se tratasse mas mesmo em zonas sem acesso a sinais GNSS.
O uso da tecnologia SFix permite recolher pontos em modo GNSS Rover, com uma precisão de até 5 cm isto durante 1 minuto sem receber sinal de satélite. Graças a esses recursos, o RS10 fornece uma qualidade de medição de pontos anteriormente inatingível em interiores de edifícios ou em áreas urbanas densamente povoadas e de difícil acesso.

SLAM em tempo real
Graças ao seu processador avançado de alto desempenho, o RS10 oferece medições SLAM (localização e mapeamento simultâneo) em tempo real. Graças a isso, o dispositivo permite a criação de nuvens de pontos georreferenciados directamente em campo permitindo um feedback imediato sobre os dados recolhidos. Permite ainda, no levantamento em modo slam, obter informação em tempo real da precisão do levantamento de maneira a podermos melhorá-lo no local se for caso disso.
Além disso, a capacidade de mapear rapidamente áreas de até 13.000 m2 por bateria (hot-swap) permite o uso eficaz do SLAM RS10 mesmo em grandes projectos de topografia.

Operação intuitiva e sistema de coordenadas consistente para medições internas e externas
Ao contrário das ferramentas típicas usadas, o RS10 permite uma transição perfeita entre ambientes externos e internos. Isto é possível, usando o mesmo sistema de coordenadas do GNSS sem a necessidade de adicionalmente determinarmos pontos de controle ou conversão de coordenadas. .
Os utilizadores podem seleccionar o sistema de coordenadas apropriado directamente no campo usando o aplicativo SmartGo ou o software LandStar™ 8. Esta solução permite a recolha de dados consistente e precisa tanto em ambientes internos quanto externos.
Vi-LiDAR para medir pontos inacessíveis
Trabalhando em modo GNSS Rover, o SLAM RS10 equipado com tecnologia Vi-LiDAR permite o uso de um novo modo de medição de ponto offset. Para isso, basta seleccionar o ponto a ser medido usando a visualização da imagem da câmara no aplicativo LandStar™ 8. As coordenadas são calculadas instantaneamente usando a posição RTK e a nuvem de pontos LiDAR, com precisão de até 5 cm em um raio de 15 m .
RS10 CHCNAV – características mais importantes:
- Três câmaras HD de 15MP (5MP*3) – E uma panorâmica 360º (opcional)
- Digitalização LiDAR 3D
- Receptor GNSS RTK integrado
- Antena de quarta geração com suporte para 1408 canais
- IP64, operação na faixa de temperatura de -20 a +50 graus
- IMU integrado
- Memória interna: 512GB
- Substituição da bateria no sistema hot-swap
- Precisão RTK: H: 8 mm + 1 ppm RMS; V: 15 mm + 1 ppm RTS
- Velocidade de digitalização 320.000pt/s ou 640.000pt/s
- Peso total: 1,9 kg
Vídeo do software de campo do RS10
Vídeo do encontro de distribuidores da CHCNAV em 2024
Acompanhe as nossas últimas novidades, na nossa página do facebook:



